Baris Yazici
Robotics Software Engineer
Computer Science researcher and practitioner bridging the gap between theoretical robotics and industry applications, with expertise in reinforcement learning and control systems. Distinguished track record of open-source contributions (200+ GitHub stars) and production-level robotics software development at Franka Robotics.
Featured Projects
stars
58+
impact
Robotics Development
adoption
Growing
PythonRobot ControlSimulationNetwork ProtocolsGenesis
Key Features
- Full implementation of the Franka robot network protocol
- Real-time simulation with 1kHz update rate
- Supports position, velocity, and torque control modes
- Seamless switching between simulation and hardware
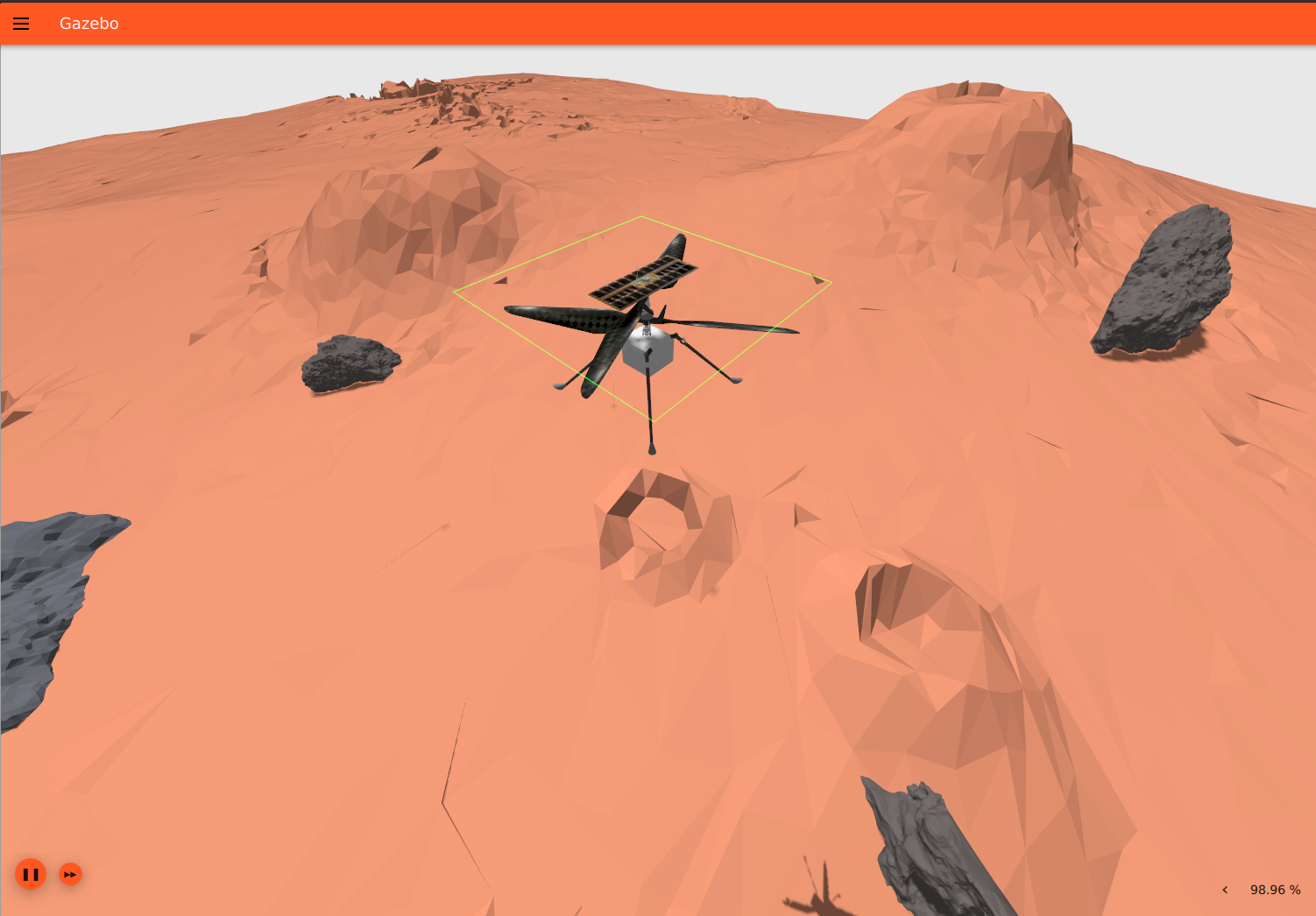
rank
5th Place
prize
$1.250
impact
Space Exploration
ROS 2GazeboC++Control Systems

downloads
200+ daily
impact
Industry Standard
adoption
Global
ROS 2C++Control TheoryCI/CD
stars
200+
forks
46
accuracy
99%
PythonTensorflowDeep LearningPyBulletComputer Vision
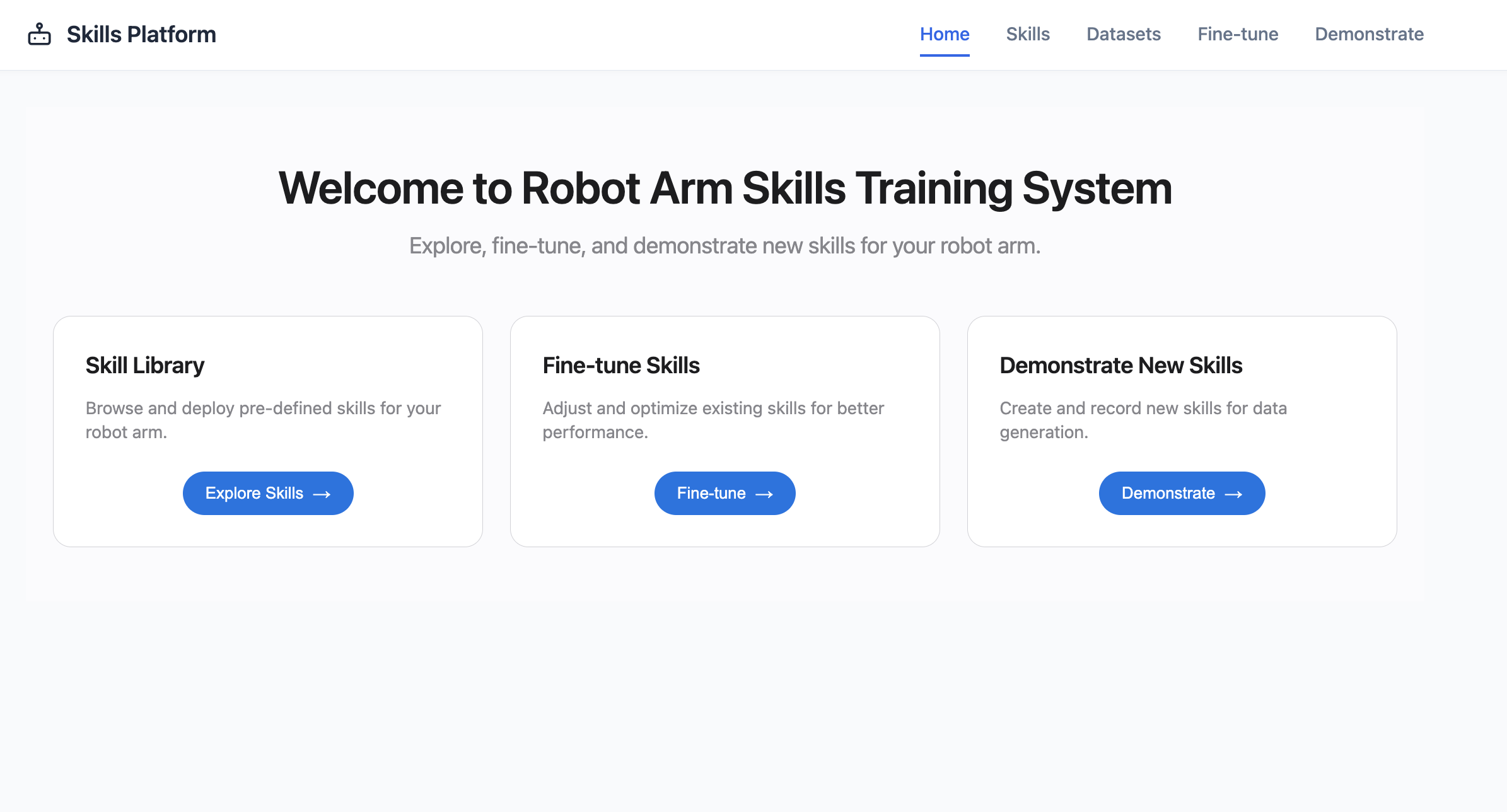
impact
Future Vision
adoption
Minimal
ReactPythonDeep LearningComputer Vision
control
Real-time
impact
Democratizing Robotics
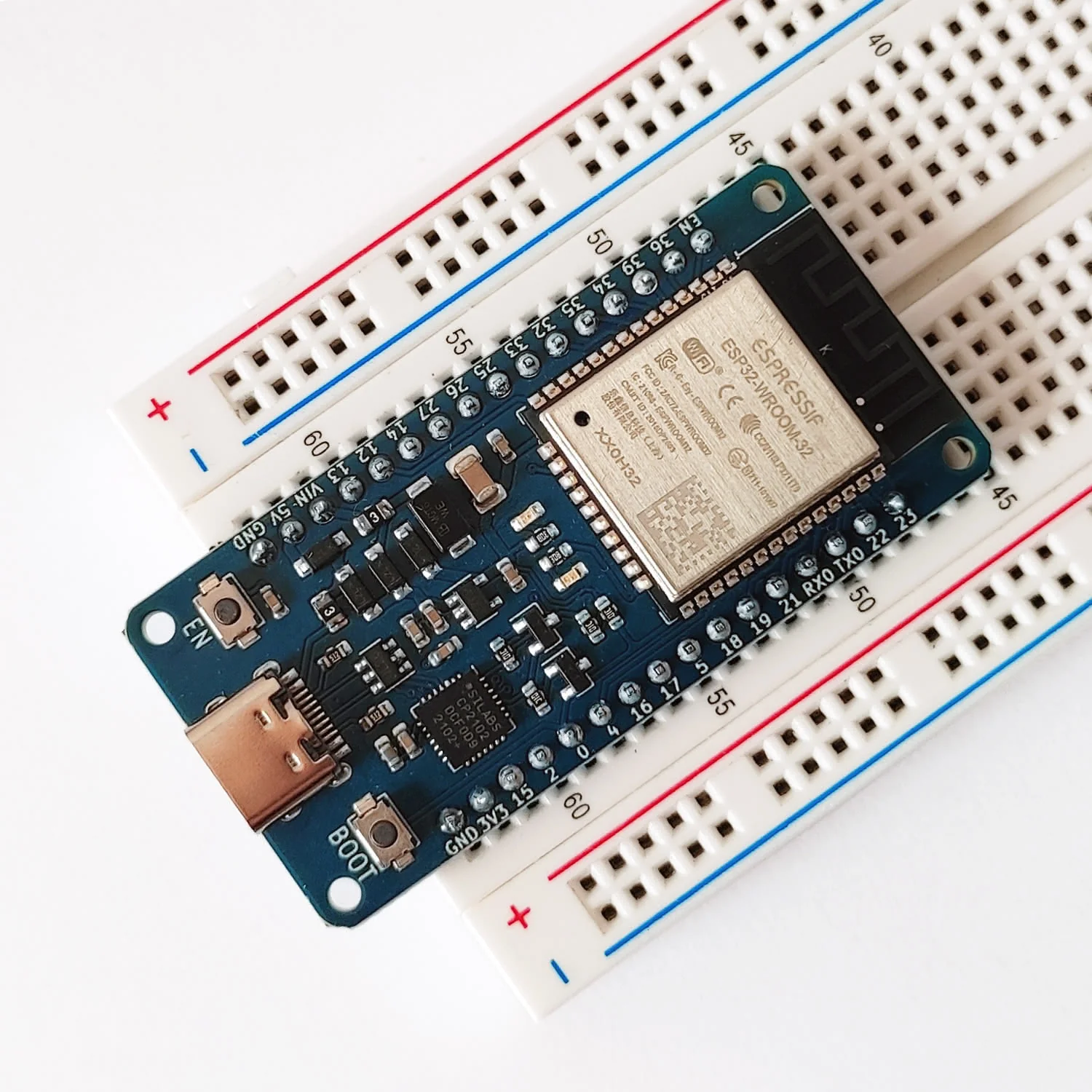
dof
4 DoF
ROS 2MicroROSESP323D PrintingMoveIt
Key Features
- Implemented multi-threaded ESP32 firmware with microROS 2
- Integrated with MoveIt for advanced motion planning
- Created comprehensive build and setup documentation